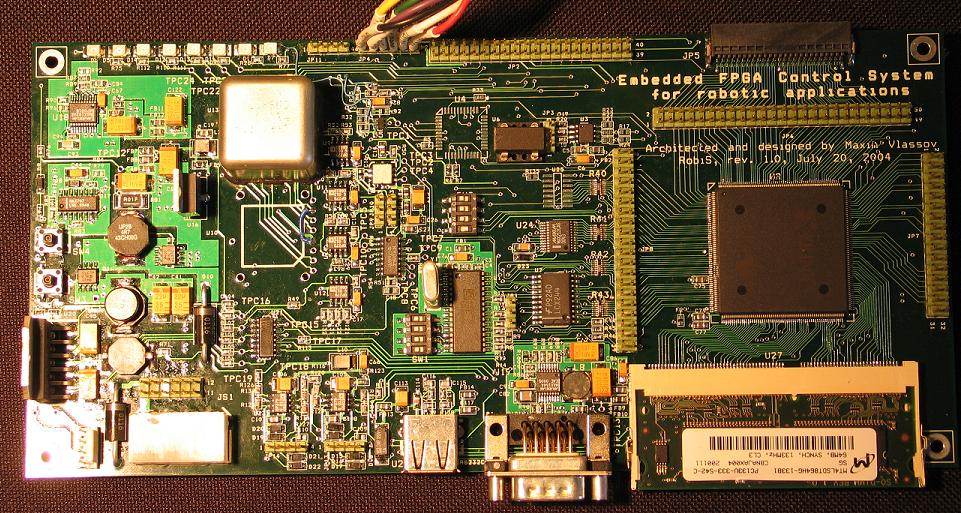
Robis
Home Lab
Improve the world
What is RIM?
RIM-I (Robot Intelligent Mobile) is a differential drive inverted pendulum robot, built around ROBIS embedded control system.
 ROBIS_M1_cameras
ROBIS_M1_cameras
The goal of RIM-I is to evaluate and demonstrate the performance of the novel SoC (System on a Chip) robotic controller in the real-world environment.
This robotic controller is compiled into the FPGA located in the ROBIS platform.
RIM-I simultaneously performs the following tasks:
dynamic stability control of the inverted pendulum chassis,
SLAM (Simultaneous Localization and Mapping) vision and odometry based,
optimal trajectory (path) calculation based on the obstacle classification data,
visual obstacle detection and classification,
telemetry, tactic data and high level command exchange via RF link.
 Robis_M1_festival
Robis_M1_festival
These tasks are quite typical for an autonomous mobile robot and therefore these tasks were selected as the life testbench for the robotic controller.
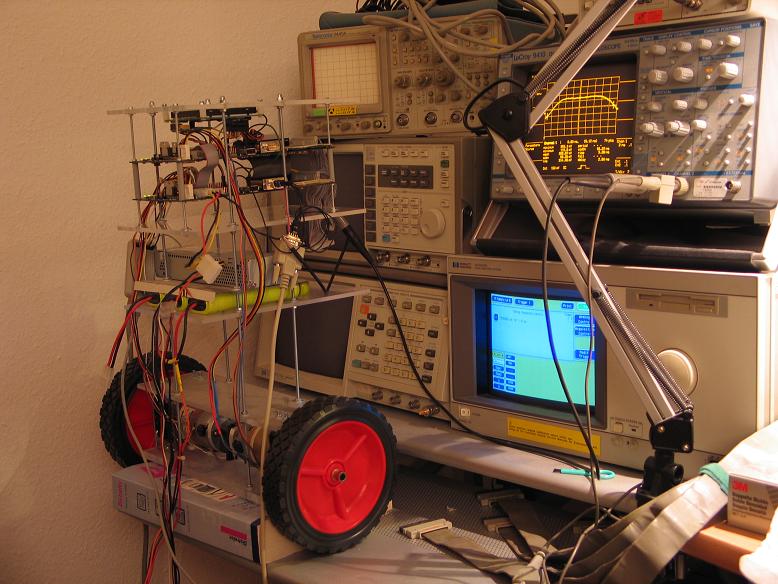
Home_testbench_4m
Improved Version
Several limitations were found when extensively using the first generation chassis. These limitations include wear and tear of sleeve bearings in the gearboxes coping with the full weight of the robot, backlash of the gearboxes, making the static position of the robot a really challenging tasks, significant elastisity of the chassis. Therefore, the second generation of the robot chassis (RIM-II) was developed and introduced in 2008.