Robis
Home Lab
Improve the world
RIM-I
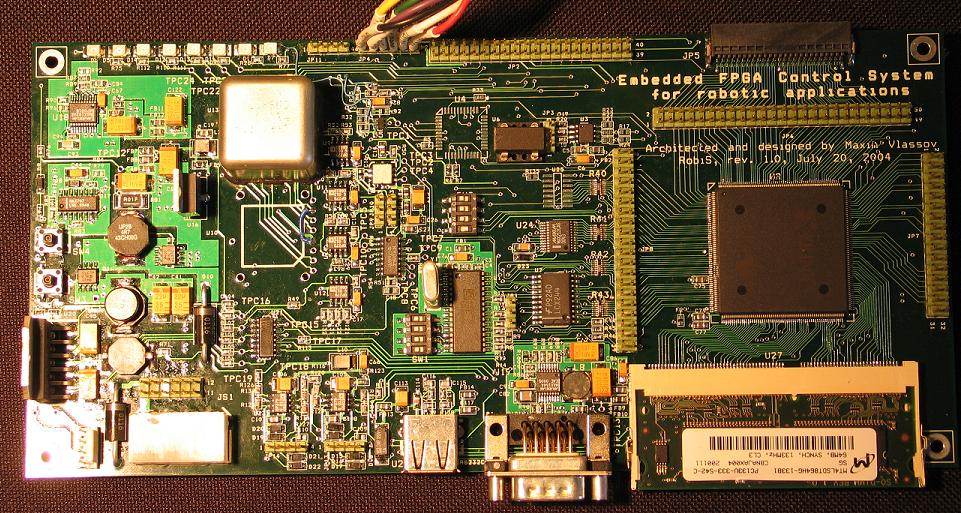
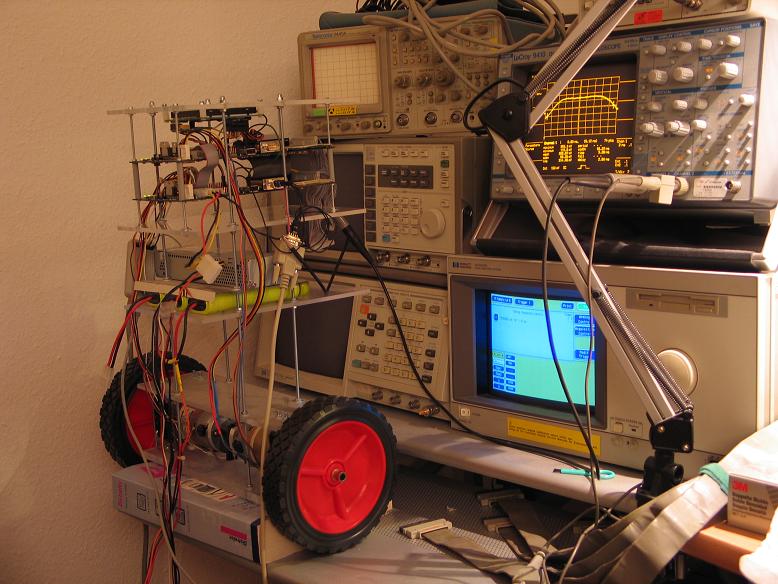
The first generation of the Robotic Intelligent Mobile (RIM) was born in 2004. This robot employs inverted pendulum kinematic scheme and controlled by the ROBIS FPGA embedded computer.
 ROBIS_M1_2011
ROBIS_M1_2011
The Second Generation of the Robot Intelligent Mobile (RIM) as well as RIM-I incorporates ROBIS control system. The debut of this robot took place in Hannover in German Open 2008 Robocup@HOME competition. Now this is the most supported platform.